



INTRODUCTION
Adult spinal deformity (ASD)—a class of disorders characterized by abnormal spinal curvature in the sagittal, coronal, and/or axial plane—affects 32%–68% of adults over age 65 [1]. While most patients are treated nonoperatively, some require surgical intervention, and the overall number of operations for ASD is expected to increase with the progressive aging of the population [2]. Surgical correction of ASD is often highly invasive, and successful realignment requires appreciation of complex biomechanics and unique patient-specific factors that influence construct selection [3]. Vertebrae involved in deformity often have dysplastic pedicles [4] that are difficult to cannulate, and optimal screw entry points may not facilitate rod passage, forcing the surgeon to settle for “good enough” trajectories as to enable placement of the longitudinal elements.
Spinal robotic systems, such as the Mazor X Stealth (Medtronic, Minneapolis, MN, USA) and ExcelsiusGPS (Globus Medical, Audubon, PA, USA), and their associated planning software have the potential to successfully address these issues [5]. Robot-assisted pedicle screw placement has consistently shown to be comparable if not more accurate than placement with freehand techniques [6,7]. However, limited studies have compared the efficacy of robotically placed S2 alar-iliac (S2AI) screws in ASD surgery to freehand techniques [8]. Modern iterations of spinal robotic systems utilize advanced planning software that can plan screw entry points to facilitate rod passage and incorporate the expected alignment changes based on osteotomy placement [9,10]. These devices consequently hold the potential to advance both open and minimally invasive (MIS) ASD correction [5,11,12].
Previously, several studies have assessed the safety and efficacy of robot-assisted ASD correction surgery by conducting retrospective analyses to evaluate specific robotic platforms [12-18]. However, to our knowledge, no comprehensive systematic review has been performed to highlight the strengths and weaknesses of this technology for surgical correction of ASD. Thus, the objective of the present study is to assess the accuracy of pedicle and S2AI screws placed with robotic guidance in ASD patients while highlighting the safety and overall efficacy of spinal robotics in ASD surgery.
MATERIALS AND METHODS
1. Search Strategy and Inclusion Criteria
A systematic literature search was conducted using PubMed Central, Google Scholar, and an institutional library database from inception to May 2023 in accordance with PRISMA (Preferred Reporting Items for Systematic Reviews and Meta-Analyses) guidelines [19]. To identify all publications assessing the use of spinal robotic guidance in ASD surgery, the following Boolean search term was used: (“spinal robotics” OR “robotic guidance”) AND (“adult spinal deformity” OR “spinal deformity” OR scoliosis”).
Following removal of duplicates, all unique studies returned by the search were screened by title and abstract according to predetermined inclusion criteria. Articles were included if they: (1) described ASD correction via robotic guidance and navigation, (2) described associated complications, and (3) reported one of the primary outcome measures listed below. Articles were excluded if they: (1) were not published in a peer-reviewed journal, (2) did not present primary data (i.e., were commentaries, editorials, reviews, perspectives), (3) described pediatric or adolescent spinal deformity versus degenerative ASD, or (4) included outcomes for both ASD and non-ASD patients without separating the data.
The initial title and abstract screen was performed by 2 reviewers and a third reviewer served as arbiter when disagreements arose. Full texts of articles were then obtained and screened according to the same inclusion/exclusion criteria to determine their eligibility in the final analysis. Assessment of suitability for inclusion was performed by the same 3 reviewers who completed the initial title and abstract screen.
2. Data Extraction Process
For each study, data were extracted on the report (author[s], year of publication), study design, patient demographics (age, sex, body mass index [BMI], indications for surgery), operative details (operative time, intraoperative blood loss, robotic system employed), and perioperative outcomes (screw placement accuracy, hospital length of stay [HLOS], complications). All data were collected by one reviewer. The primary outcome of interest was screw placement accuracy. This was defined based on screw trajectory and degree of cortical breaching, most commonly reported using the Gertzbein and Robbins Scale (GRS) [20] for pedicle screws (Table 1) and self-reported accuracy and breach rates for S2AI screws. Secondary outcomes of interest included mean operative time, estimated blood loss (EBL), HLOS, revision rates, and complications. All results that were compatible with each outcome domain were collected. Relevant outcomes and calculations were presented in table format.
3. Study Appraisal and Methodological Quality
All studies included in the present systematic review were assessed for level of evidence in accordance with the methodology previously described by Yarascavitch et al. [21]. In line with this rating system, only highest quality randomized controlled trials, which must be double-blinded and clearly randomized, earn the designation of Level I evidence. On the other hand, low quality randomized controlled trials (e.g., those with improper blinding or randomization, substantial follow-up attrition) are assigned Level II evidence. Furthermore, while prospective comparative studies are assigned Level II evidence, case-control studies and retrospective comparative studies generally meet criteria for Level III evidence. Finally, noncomparative retrospective studies and small case series consist of Level IV evidence, while expert opinions and case reports constitute Level V evidence (Table 2).
The Newcastle-Ottawa scale (NOS) was used by one reviewer to assess the methodological quality of the selected studies on 8 different criteria across 3 domains: selection, comparability, and outcome. It is designed to measure the risk of selection, information, and confounding biases, and scoring is performed by allocating points when the criteria are met. A maximum of 9 points demonstrates a perfect score.
4. Statistical Methods
Each study was categorized by screw type examined (pedicle or S2AI). Three categories were subsequently developed: (1) studies that assessed pedicle screw outcomes alone, (2) studies that assessed S2AI screw outcomes alone, and (3) studies that assessed both pedicle and S2AI screw outcomes.
All primary and secondary outcomes of interest as well as baseline patient demographic and surgical characteristics were synthesized using descriptive statistics to highlight potential relationships between the variables. Data were presented as mean±standard deviation for continuous variables, and counts and proportions for ordinal, categorical, and dichotomous variables. Throughout all analyses, p< 0.05 was defined as the threshold for statistical significance.
RESULTS
1. Patient Demographics and Study Characteristics
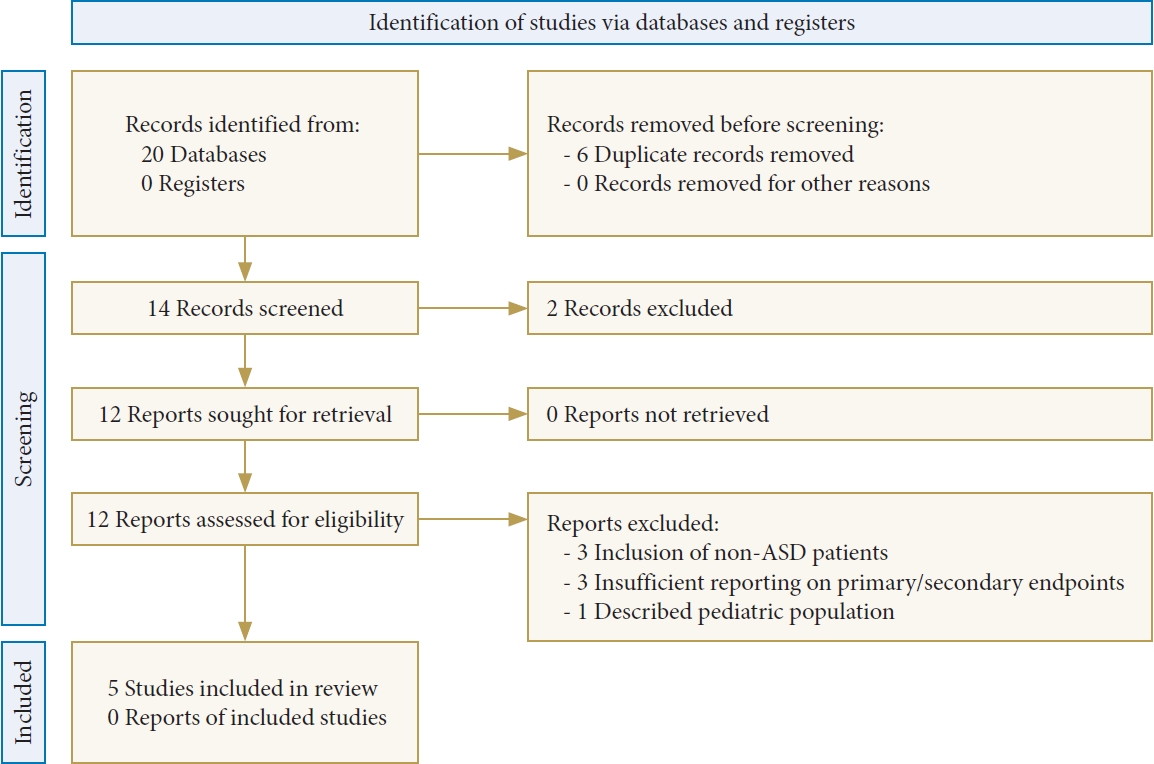
Of 14 unique studies screened against title and abstract, 12 met criteria for full-text analysis, of which 5 studies comprising 138 patients (61.6% female; mean age, 66.0 years) were ultimately included [12,13,16-18]. The most common reasons for study exclusion were inclusion of non-ASD patients within the study cohort (n= 3) [14,22,23] and failure to report one of the prespecified outcome measures (n= 3) [9,24,25] (Fig. 1). One study was excluded because it described a pediatric population in its clinical cohort [15]. BMI was reported for 114 patients for whom the mean was 25.2± 0.65 kg/m2. The most common indication for surgery was adult degenerative scoliosis (n= 125, 90.5%); other diagnoses included sagittal imbalance (n= 11, 8.0%), and other scoliosis or kyphoscoliosis (n= 9, 6.5%). NOS scores ranged from 4 to 9 with a mean score of 6.4 which corresponds with a moderate risk of bias (Table 2).
2. Robot Models and Screw Characteristics
The robotic system utilized was reported for 124 cases (Mazor Renaissance: n=87 [63%], TIANJI: n=31 [22%], Mazor X Stealth: n= 6 [4%]). The remaining 14 patients (10%) underwent procedures using either the Mazor Renaissance or SpineAssist systems; however, the specific distribution was not specified. An MIS approach was described in 10 patients with the remaining 128 patients undergoing surgery through an open approach (93%). A total of 1,508 screws (pedicle and S2AI) were placed under robotic guidance (Table 3). The screw accuracies examined were for pedicle screws in 120 patients and S2AI screws in 24 patients (6 [4%] underwent both pedicle and S2AI screw fixation).
3. Pedicle Screw Accuracy and Postoperative Outcomes
Three studies [12,17,18] reported outcomes for pedicle screw placement of 1,457 pedicle screws among 120 patients. Collectively, 1,264 screws were described as grade A, 81 as grade B, 32 as grade C, 7 as grade D, 0 as grade E. Six screws were revised manually after the robotically proposed trajectory was considered to be inaccurate. The remaining 67 screws were ungraded. Chen et al. [17] reported 98.7% of screw trajectories as clinically acceptable (grades A+B) with 89.9% as perfect (grade A) while Fan et al. [18] reported 96.0% as clinically acceptable with 91.3% as perfect. Breach rates reported for these studies were 10.1% and 3.4%, respectively. Pham et al. [12] described 3 cortical breaches (4.5%) with an overall accuracy rate of 95.5% (Table 3). Among the 120 cases, 8 patients (6.7%) experienced adverse events (surgical wound revision: n= 4, wound infections: n= 2, dural tear: n= 1, pressure sores: n= 1). No neurological complications were reported. Two patients (1.7%) required reoperation surgery for cage dislodgement, 1 (0.8%) for proximal junction kyphosis, and 1 (0.8%) for wound infection. The mean HLOS for all 3 studies was 9.03±3.9 days and mean EBL was 454.3±251.8 mL (Table 4).
4. S2AI Screw Accuracy and Postoperative Outcomes
Three studies [12,13,16] reported outcomes for 51 S2AI screws placed in 24 patients (Table 3). All 3 studies described accuracy rates as 100% with no reported incidences of anterior sacral cortical breach. Bederman et al. [13] described 20 screws protruding through the ilium distally by < 2 mm, one screw by 2–4 mm, and 10 screws by > 4 mm. No violations of the sciatic notch nor misplacement of the screws were noted in the studies. Furthermore, no intraoperative or postoperative S2AI screw-related complications were encountered.
DISCUSSION
ASD is a common degenerative disease characterized by 3-dimensional malformation of the spine as a result of progressive asymmetrical degeneration of the intervertebral discs and facet joint complexes [26]. The secondary distortions in locoregional bony anatomy complicate instrumentation placement during surgery. Prior work has found malpositioned hardware to account for nearly 50% of all instrumentation-related complications in persons undergoing instrumented fusion with the remainder being attributed to migration (28.3%) and implant failure (23.3%) [27]. Instrumentation complications are especially pronounced in patients who require extensive and complex constructs, and approximately 27% of patients with misplaced instrumentation may require implant removal, increasing the risks for additional cost and morbidity [27].
Spinal robotics have been suggested to be a potential solution for this issue, as multiple prior studies have found robot-assisted screw placement to increase instrumentation accuracy relative to freehand techniques [28-32]. This has predominately been noted for the placement of thoracolumbar pedicle screws in patients with degenerative pathologies. For example, in their retrospective series evaluating 3,271 pedicle screws in 635 patients, Devito et al.33 reported 98% of 646 graded pedicle screws placed using robotic guidance as clinically acceptable (GRS grades A or B). This rate was notably higher than accuracy rates previously reported for conventional freehand techniques. Some studies, such as that of Jiang and colleagues have failed to demonstrate superiority [34]. In their study of 56 consecutive patients undergoing 1- or 2-level lumbar fusion for degenerative disease, the authors noted comparable accuracy rates between patients instrumented with robotic assistance and those instrumented with freehand techniques. However, none of the patients were treated for ASD, and all freehand-placed screws were placed by fellowship-trained surgeons, a group for whom robotic assistance may be least beneficial [34]. Holistically though, the literature appears to favor robot-assisted placement. To this end, a recent meta-analysis by Fatima et al. [35] comprising 19 studies evaluating 7,379 pedicle screws found that perfect screw accuracy (GRS grade A) was achieved at higher rates with robot-assisted surgery as compared to conventional, freehand techniques (odds ratio [OR], 1.68; 95% confidence interval [CI], 1.20–2.35; p= 0.003). Similar results were found when evaluating and comparing clinically acceptable pedicle screw accuracy rates across both cohorts (OR, 1.54; 95% CI, 1.01–2.37; p= 0.05) [35]. Furthermore, Himstead et al. [36] performed a robust meta-analysis to assess accuracy of robotic screw placement across all robotic platforms and for all screw placement types/trajectories. Ultimately, they found that robotic guidance enabled superior screw placement accuracy compared to conventional techniques (OR, 2.24; 95% CI, 1.71–2.94), as average screw placement accuracy for the robotic group (8,174 screws) was 95.9% as compared to 91.3% for the conventional group (9,791 screws) [36].
Several studies have also described the accuracy and feasibility of robotic-guided S2AI screw placement for pelvic fixation in ASD surgery [14,22]. In a retrospective review by Good et al. [14] evaluating 118 S2AI screws across 65 ASD patients, 100% of 46 graded S2AI screws showed perfect accuracy with no reports of breach or perioperative complications. Similar results were described by Hu and Lieberman [22] where 35 S2AI screws were evaluated across 18 patients, all of which demonstrated accurate trajectories with no proximal breaches of the anterior sacrum or compromise of any visceral or neurovascular structures. Laratta et al. [23] evaluated 23 patients who underwent spinopelvic fixation with 46 S2AI screws under robotic guidance and described an overall accuracy rate of 95.7%. Two violations of the iliac cortex were noted; however, there were no intraoperative neurologic, vascular, or visceral complications reported associated with the hardware [23]. Shillingford et al. [8] have compared the accuracy of S2AI placement using robotic guidance versus freehand techniques. They illustrated that although the average caudal angle in the sagittal plane was significantly larger in the robotic guidance group (31.0°± 10.0° vs. 25.7°± 8.8°, p= 0.005), there was no difference in the overall accuracy between freehand and robotic guidance techniques (94.9% vs. 97.8%, p= 0.630) [8].
Despite the existing literature describing the general accuracy and efficacy of spinal robotics for placement of different screw trajectories across different robotic platforms, no prior systematic review has, to our knowledge, focused on robot-assisted screw placement accuracy in patients with ASD. The present study distinguishes itself from prior work by focusing specifically on this clinical population. ASD poses many unique biomechanical challenges, notably the need to perform osteotomies and interbody correction maneuvers to restore physiological alignment, the need to place screws in small, dysmorphic, rotated pedicles, and the need to match up screw entry points to allow for rod placement. To this end, one recent study by Lin et al. [37] examined pedicle diameter on the curve convexity and concavity in a series of 39 patients with adult scoliosis undergoing surgical correction. They found pedicle asymmetry in nearly 40% of all cases and the majority of cases deemed to be idiopathic, which led them to propose a pedicle diameter asymmetry > 1 mm as a diagnostic criteria for idiopathic scoliosis. Dysplastic pedicles can pose serious challenges during cannulation, increasing the risk for breach and subsequent injury. Additionally, an eccentric trajectory in a dysplastic pedicle may result in a pedicle blowout fracture and an inability to instrument said pedicle, reducing the number of fixation points available for use during intraoperative deformity correction maneuvers. Techniques that maximize the accuracy of pedicle screw placement would therefore likely have the greatest benefits in this clinical population, and so a better understanding of the benefits of spinal robotics within the ASD population is needed [4].
Use of robotics and their associated planning software platforms can potentially help surgeons accomplish the goals of surgical correction more consistently and reliably. This is another domain underexplored by prior work focused on robot-assisted pedicle screw placement in degenerative pathologies. As highlighted by this review, there is currently a paucity of literature demonstrating direct benefit from the application of deformity planning software to ASD surgery. Such software leverages the experience of thousands of prior cases and can assist surgeons in planning physiological correction of the deformity. As correction to age-adjusted alignment parameters has been correlated with superior patient reported outcomes, the planning software being incorporated into many current-generation robotic platforms may improve the consistency with which these outcomes are achieved [38].
Furthermore, spinal robots and their associated planning software may enable these challenges to be addressed while also allowing the application of MIS techniques. These MIS approaches (e.g., lateral interbody fusion, transfascial or percutaneous instrumentation), have garnered increased interest in ASD surgery, as they promise to decrease the morbidity of surgical ASD correction within this notable patient demographic. Nevertheless, understanding the safety and efficacy of these technologies is essential as they see increased adoption. As such, the present review focused on robotic screw placement accuracy specifically in ASD patients to understand if the improvements in instrumentation accuracy seen within the degenerative spine surgery population were also achievable within ASD. The results, though based upon limited data, suggest that the high degree of accurate instrumentation placement is indeed seen in the ASD population, even when considering S2AI screws, which have seen increased adoption as the strategy for distal fixation in ASD correction surgery [12]. However, the present review also highlights the need for ongoing investigation, specifically on the exact benefits offered by the deformity planning software now being integrated into current-generation robotic platforms.
Ultimately, we found that the use of robotics systems demonstrated excellent accuracy rates among cohorts undergoing pedicle screw and/or S2AI screw fixation in ASD surgery. The pedicle screw accuracy rates described by Chen et al. [17] and Fan et al. [18] (98.7% and 96.0%, respectively) are comparable to the rates described in the study conducted by Devito et al. [33] (98%). These studies also demonstrated relatively low complication and revision rates (6% and 2%, respectively), with the most common complication being surgical wound revisions (57%). Furthermore, the S2AI screw accuracy rates reported by Bederman et al. [13] and Hyun et al. [16] were similar to the ones reported by Good et al. [14], and Hu and Lieberman [22]. As no misplacement, complications, or revisions were experienced in the cases described in these 2 studies, robotic guidance seems to be a safe means of successful instrumentation placement in ASD patients undergoing pelvic fixation. The study described by Pham et al. [12] also reported excellent accuracy for both pedicle screw and S2AI screw placement (96.7%). In contrast to the other studies, these authors used multiple rod constructs placed via a MIS approach, suggesting that even complete constructs can be safely created using MIS approaches with the assistance of next-generation surgical robots.
In addition to improving instrumentation placement accuracy, next-generation spinal robots may increase the safety for surgeons and surgical staff through decreased radiation exposure and may decrease the surgical morbidity for patients. One recent study supporting this was published by Lee et al. [10], who examined a multicenter cohort of 646 patients having undergone robot-assisted surgery with either the Mazor X or Mazor X Stealth platform, the latter of which is a next-generation system incorporating intraoperative navigation. From the cohort, propensity score-matching was used to generate a case-control sample of 186 patients operated with the Mazor X and 186 operated with the Mazor X Stealth Edition [10]. Both systems achieved excellent screw placement accuracy rates with accurate screw placement in 99.6% and 99.1% of cases, respectively. However, the navigated robotic platform was associated with decreased fluoroscopy time per screw (7.2 vs. 10.4 seconds, p< 0.001) and lower rates of robot abandonment (0% vs. 2.2%, p= 0.044).
The preoperative planning software incorporated into next-generation robotic systems represent another potential advantage of these systems for ASD surgery and an area for further exploration. Pham et al. [12] recently described this advantage in a small case series wherein they used a next-generation robotic platform to place multirod constructs in 6 ASD patients using MIS techniques (transfascial screw placement). The authors noted that the greatest benefit of the robotic platform was the ability to select screw trajectories preoperatively that aligned the tulip heads to facilitate subfascial passage of the rod. To illustrate this advantage, they also compared the rod shape between a construct with the screws placed in the ideal transpedicular trajectory at each level and one in which tulip head alignment was prioritized. The rod in the former required significantly greater contouring to the point that it may have been unpassable. Such extensive contouring has previously been demonstrated to reduce construct fatigue strength [39,40], so by facilitating tulip head planning, the software in next-generation robotic systems may indirectly increase the stability of ASD constructs. Furthermore, the planning software on these platforms can also help surgeons plan osteotomy placement for rigid deformities. By identifying planned screw trajectories, they can enable the use of prebent rods which have been demonstrated to have superior fatigue resistance relative to conventional notched rods. For example, the Mazor X Robotics Planning Software with XAlign has previously been reported as predictive of postoperative coronal Cobb angle to within 6° and postoperative sagittal Cobb angle to within 9° [41]. This predictive accuracy associated with next-generation preoperative planning introduces efficient and reliable mechanisms for approaching complex cases without having to sacrifice MIS techniques.
However, robotic technologies are not without drawbacks. Overreliance on robotic guidance technologies can potentially compromise the education of trainees by reducing their exposure to freehand techniques—a critical component necessary for surgical correction in instances of system malfunction. Furthermore, because of the novelty of this technology, it is worth considering the learning curve associated with proficient utilization of these devices and their integration within training programs. In a systematic review conducted by Pennington et al. [42], the authors found that most studies on spine robot learning curves have reported that there is a threshold ranging from approximately 20–30 cases before the learning curve is surpassed. Therefore, the use of robotic devices in ASD surgery and their level of proficiency merit thoughtful consideration of the surgeon’s experience in using this technology. Finally, robotic guidance systems have a steep purchase cost which can be prohibitive for many institutions [11]. These costs can only be recovered under the supposition that robot-assisted surgery decreases indirect costs through decreased hospitalization, transfusion, and rates of surgical revision. The degree to which these devices are able to accomplish these goals is at present unclear and is a question that must be addressed when considering the ability of spine robots to be more widely adopted in clinical practice.
We acknowledge several limitations to the present study. First, due to the paucity of data regarding the use of spinal robotics in ASD cases, the sample size for S2AI screws is much smaller than that of pedicle screws, making the assessment of efficacy difficult due to this disproportionality. Furthermore, since there is limited data pertaining to our secondary endpoints, namely EBL and HLOS for robotic-guided ASD surgeries, a complete assessment of these parameters was not performed, limiting the extent to which we are able to illustrate the efficacy of robotic systems in this context. An analysis comparing the surgical efficacy between different robotic platforms was also infeasible due to the limited sample size.
We would like to acknowledge that the data were extracted and analyzed by 1 reviewer from a limited number of databases, potentially introducing a source of error. Nevertheless, due to the number of repeat articles we encountered and relatively small dataset, we are confident that these limitations would not substantially change the conclusions of this review. Further studies, including retrospective reviews and prospective, randomized controlled studies are warranted.
CONCLUSION
Spinal robots have been shown to increase screw placement accuracy in degenerative disease, but the degree to which such benefits are realized in ASD surgery is unclear. In the present review we find that current evidence, while limited, supports the application of these platforms to ASD surgery as a safe means of instrumentation placement for both pedicle and S2AI screws. Robotic platforms may also help select screw trajectories that facilitate rod placement, especially in the context of MIS ASD correction surgery. Further research using larger populations directly comparing robot-assisted, freehand, fluoroscopy-guided, or navigated techniques is merited to better understand the degree to which robotic assistance facilitates accurate instrumentation placements. Lastly, further investigation into the degree to which next-generation robotic platforms and their associated planning software can facilitate MIS correction of ASD is merited.