



INTRODUCTION
The Mazor X Stealth Edition Robotic Guidance System (MXSE; Medtronic, Dublin, Ireland) offers the benefits of 3-dimensional (3D) segmental preoperative planning software along with bone mounted intraoperative robotic guidance and navigation confirmation. Mazor Core Technology has been shown in multiple studies to be highly efficacious for the placement of minimally invasive pedicle and cortical screw trajectories. Recent software upgrade to version 5.0 includes enhanced surgical planning capabilities and allows the use of a high-speed burr for the purposes of cannulating bone trajectories and using navigated tools independent of the robotic arm. One benefit of this evolution is the enhanced ability to drill through or make cuts in bone with a high-speed burr (75,000 RPMs) as compared to a traditional drill with a maximum speed of 250–300 RPMs. The faster speed allows for smoother, more precise bone cutting and trajectory placement. The Mazor preoperative planning software not only allows for the optimization of implant size and purchase, but also aligning screw heads to improve cadence for easier rod passage and decreasing risk of screw pull-out.
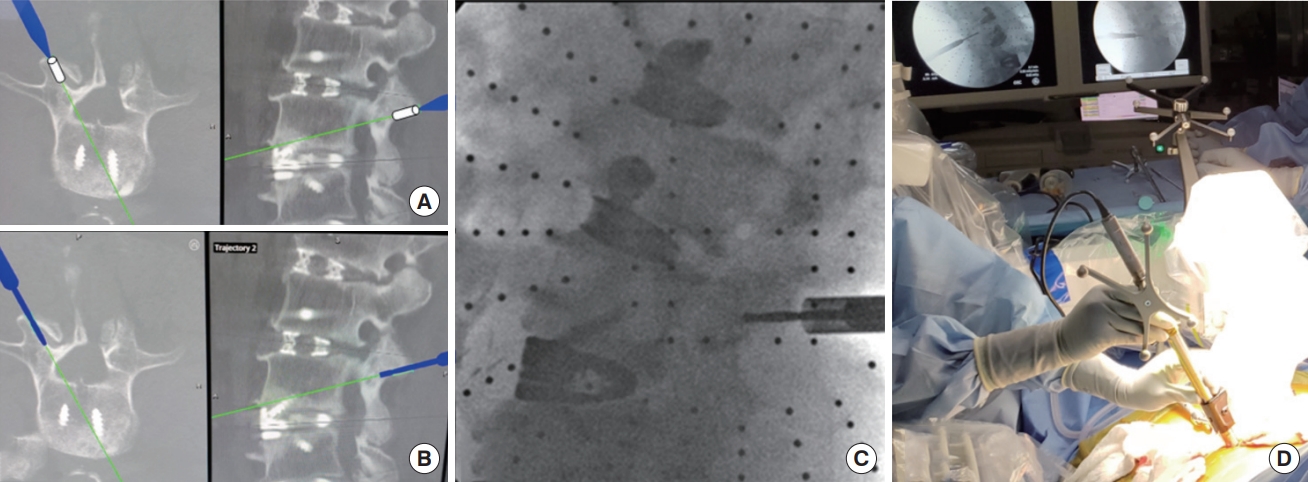
A growing body of literature demonstrates that robotic-guided spine surgery leads to decreased implant-related complications, revision surgeries, and intraoperative radiation exposure while achieving a high a degree of implant accuracy [1-4]. Given the potential advantages to minimally invasive robotic-guided spine surgery combined with navigation and the latest robotic software advancements, utilization of these invaluable intraoperative tools is expected to increase. It is the authors’ opinion that future uses for these systems will include higher level bone cutting functions including facet decortications, osteotomies, and robotic-assisted spinal decompressions. The purpose of this article is to describe the technique for achieving minimally invasive surgery (MIS) posterior facet decortication and fusion using navigated robotic guidance with MXSE and to describe the authors’ early experiences with this emerging technique during minimally invasive posterior instrumented fusion. This article will demonstrate that a reproducible navigated and planned technique for achieving an MIS posterior fusion is now possible (Fig. 1A–D).
PREOPERATIVE SURGICAL PLANNING
Precise planning for minimally invasive spine surgery—including implant locations, screw head alignment, rod passage, and facet decortication—can be made with segmental planning software preoperatively using a high resolution, 3D computed tomography (CT) scan or intraoperatively using 3D O-arm spin. It is the authors’ preferred workflow to use the preoperative CT-to-fluoro option, which affords more time for strategic planning prior to the start of the surgical procedure.
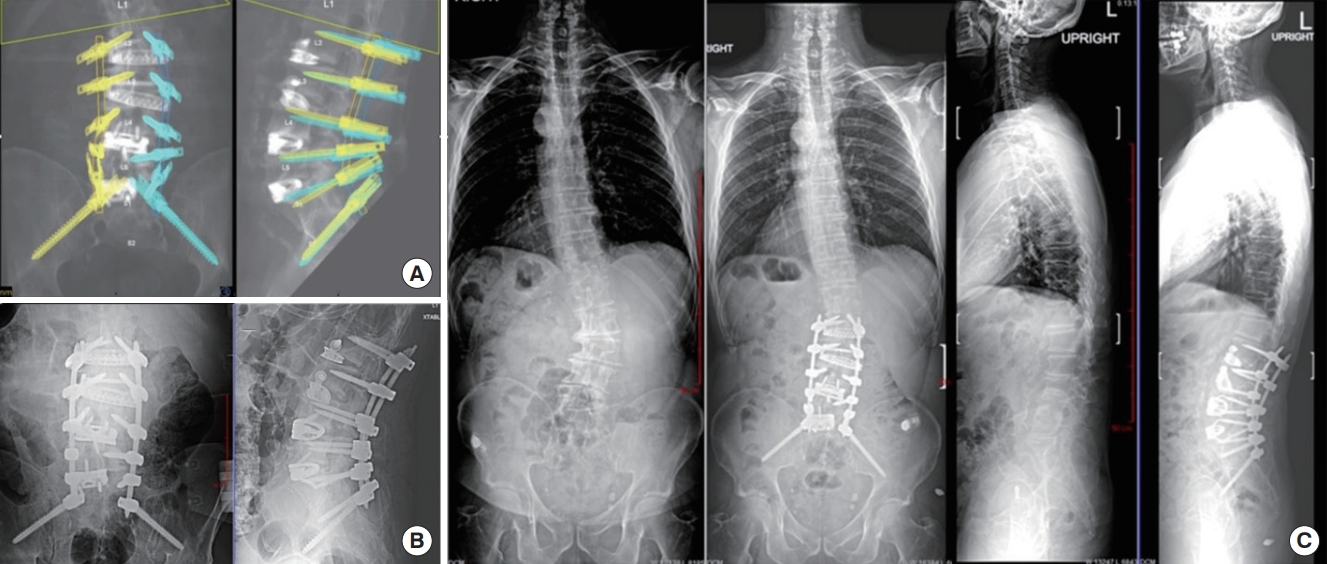
The first step in planning the surgical procedure is to plan ideal screw size, trajectory, and alignment for minimally invasive pedicle screw instrumentation. This can be done at a segmental level but also by visualizing the entire construct to optimize screw alignment and lordosis (Fig. 2A). Simultaneously, implant trajectories can be used to determine the skin incision location and can be adjusted to optimize the skin incision (Fig. 2B). In the example shown in Fig. 2B, separate stab incisions are used for the L2 and L3 percutaneous screws while paramedian incisions are used for the remaining lumbosacral pedicle screws and the contralateral S2AI screws. Using the software’s ‘planar rod function,’ the surgeon is able to identify which screws will not line up with a straight rod in the coronal plane which the software will highlight in pink. Deformity correction is then simulated if applicable to the case.
Finally, once implant trajectories are optimized, facet trajectories are planned with the goal of utilizing the same skin incision used to place the screws (Fig. 3A). The facet trajectory of any segment is best planned on the caudal segment. For instance, the decortication of the L4/5 facet should be planned on the L5 vertebral segment. This avoids any plan-to-execution mismatch, for example if an interbody device is placed that could alter the facet alignment from the preoperative CT scan to the intraoperative registration. The software allows for trajectories of different sizes to be utilized (Fig. 3B, C). In the authors’ experience, facets can be removed robotically using multiple different techniques. Facet decortication has been performed using a drill to open a 9-mm trajectory along the facet and using multiple smaller trajectories aligned along the facet.
Facet trajectories can also be planned in multiple orientations based on surgeon preference. A straight up and down trajectory in the axial plane allows for decortication of the facet joint without pointing the trajectory toward the canal or neural elements; however, this cannot typically be done through the same MIS skin incision used for the pedicle screw location at that level. It is the authors’ preferred technique to plan facet trajectories at an angle in-line with the facet joint angle on the axial view, which intersects with the same skin incision previously utilized for pedicle screw instrumentation. Prior to the innovation of a navigated burr combined with robotic guidance, the authors had used a single 9-mm drill trajectory. Since the release of the new upgrade, the authors typically plan multiple 3-mm trajectories to decorticate the facets using the high-speed burr. The depth is approximately 10–15 mm depending on patient anatomy, but always at least 5 mm away from the dorsal spinal canal.
INTRAOPERATIVE TECHNIQUE
1. Overview
The operating room setup, robotic system to bed mounting, robotic arm to patient mounting, and registration have all been described in detail in the literature [4,5]. The authors prefer to attach the robotic arm to the patient using two bone mounts to the posterior superior iliac spine for additional stability. In the authors’ opinion, best practice throughout any robotic-guided minimally invasive procedure includes addressing the most mobile and distal segment from the bone mount first, then working from the least to most stable segment of the spine. It is also the preferred technique to use the robot system to cannulate all pedicles and make all robotic bone cuts prior to placing any robotic-guided instrumentation and then to place all implants sequentially as the final step of the operation. The authors choose not to place pedicle screws during the initial cannulation because a greater rotational torque is created across that spine segment which could potentially lead to a higher risk of spine shift and loss of registration. Therefore, the more delicate work is best done prior to the placement of the instrumentation.
2. Screw Cannulation
After sending the robotic arm to the most mobile segment first, the robotic-guided scalpel is used to dissect any tissue that may cause a deviation in the execution of the plan. The navigated dilator is advanced close to, but not touching, bony anatomy to prevent shift. Precise pedicle screw cannulation is achieved using a high-speed (75,000 RPMs) 3-mm end-cutting burr which greatly decreases the chance of skive or shift from the preplanned trajectory. Fluoroscopy can be used to confirm drill location.
The authors’ preferred workflow is to then send the robotic arm to the facet trajectory above that pedicle, decorticate the facet joint, and place the desired bone graft material through the same skin incision. Once drilling of the pedicles, facet decortication, and grafting are completed at all levels, the final pass is to place all pedicle screws starting with the most mobile segment.
3. Facet Decortication and Fusion Technique
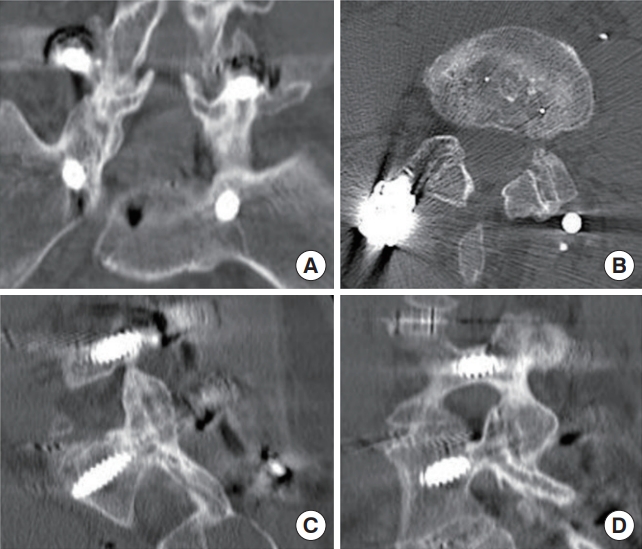
To accomplish facet decortication, the robotic-guided scalpel is placed down to bone along the preplanned facet trajectory. It is the authors’ experience that there is usually a tactile sensation of cutting the facet capsule as the robotic scalpel docks to bone. It is the authors’ recommendation that the robot-assisted scalpel be advanced perpendicular to the plane of the facet joint to minimize the very small chance that the scalpel enters perfectly inline with the facet joint and advances into the spinal canal. Next, the navigated dilator is placed and verified visually that it lines up perfectly with the planned facet trajectory. The surgeon independently verifies when the navigated dilator touches bone both visually on the screen and by the tactile sensation of bone (Fig. 4A). If at any point the visual does not line up with tactile feedback, abort the facet decortication and consider reregistration.
The navigated drill is turned on above the point of contact with bone, then is advanced with 2-finger light touch down to the planned depth and visualized on the navigation screen. The authors typically drill facet joints to a depth between 10–15 mm depending on patient anatomy, but always recommend stopping the facet decortication at a minimum of 5 mm away from the dorsal spinal canal (Fig. 4B). The authors recommend never planning to drill closer than 5 mm to the spinal canal, and in many cases the planned trajectories end well before this 5-mm end point, which highlights the benefit of the software advances for preplanning these precise maneuvers. The depth should always be confirmed by navigation. Fluoroscopy can also be used to confirm drill location if desired (Fig. 4C, D).
The drill is removed, and bone graft is placed into the robotic cannula and packed into the facet defect. One author creates a slurry of demineralized bone matrix and morselized bone morphogenetic protein sponges, packing 0.5–1 mL through the funnel into each decorticated facet joint, which is easily pushed through the funnel with an inverted pedicle sounder or plunger. Alternatively, a second author soaks cancellous allograft chips in previously harvested bone marrow aspirate and places the desired aliquot into each decorticated facet joint.
4. Screw Placement
Awl-tap-screws are then inserted into the screw tracks previously created, which avoids the extra time and torque associated with tapping (Fig. 5A). However, tapping followed by screw placement is an alternative method. The authors’ preferred screw placement workflow starts at the most mobile segment (often the most proximal pedicles), then screws are placed at each level bilaterally while moving towards the most stable segment with pelvic fixation being placed last.
If pelvic fixation is planned, this can be done through a small midline incision or often placed through the opposite paramedian MIS incision, depending on the patient’s pelvic anatomy and what works best for screw head alignment (Fig. 5B).
5. Final Maneuvers
Once all screws are placed and verified, rods are measured and contoured according to the plan, then placed in a minimally invasive fashion. Additional compression, distraction, or rotation maneuvers are performed as necessary, and then set plugs are fastened. Once screws are tightened according to the manufacturer’s specifications, final x-rays are obtained to confirm the goals of surgery have been achieved (Fig. 6A, B). A comparison of the preoperative and postoperative standing x-rays for this case is shown in Fig. 6C.
This technique is commonly used in association with anterior column realignment with interbody fusion (anterior lumbar interbody fusion, lateral lumbar interbody fusion, and oblique lumbar interbody fusion) to allow for correction of coronal and sagittal deformities including flat back syndrome and spondylolisthesis. For this particular case, anterior interbody fusion was approached laterally at L2/3 and L3/4 and anteriorly at L4/5 and L5/S1.
DISCUSSION
The minimally invasive approach to both degenerative and spinal deformity surgeries has the potential to decrease short- and long-term complications compared to traditional open techniques without sacrificing the necessity of achieving solid posterior fusion.
The advantages of less tissue dissection, less blood loss, less radiation exposure, and less time under anesthesia have great potential to achieve shortened hospital stays, faster recoveries, less narcotic use, and less overall economic burden on the healthcare system. McAfee et al. [6] retrospectively compared MIS with open spine surgery to analyze the success of the MIS approach and found that one of the clearest advantages of spinal MIS is the lower rates of infection compared to open procedures. Similarly, in a retrospective review of prospectively collected data on postoperative surgical site infections (SSI) after MIS spine surgery, O’Toole et al. [7] concluded that minimally invasive spinal surgery techniques may reduce wound infections as much as 10-fold compared with rates of SSI after open spinal surgery published in the literature.
In the prospective comparative MIS ReFRESH study, Good et al. [1] showed that MIS robotic-guided surgery had 5.8 times fewer surgical complications related to screw placement and 11.0 times fewer revision surgeries compared to MIS fluoroscopic-guided surgery. The study also showed a reduction of intraoperative radiation exposure by 80% with robotic guidance.
In a systematic review of minimally invasive procedures in spine surgery, Banczerowski et al. [8] concluded that in addition to the already described lower rates of complications, further benefits of the MIS approach to spine surgery include a favorable esthetic outcome with smaller incisions and sparing of the posterior elements with effective posterior stabilization of the spine. Zhang et al. [9] specifically compared violation of the superior-level facet joints between robot-assisted percutaneous pedicle screw placement and conventional open fluoroscopic-guided screw placement in a prospective cohort study. They concluded that MIS robot-assisted spine surgery was associated with fewer proximal facet joint violations, larger facet-to-screw distance, and higher intra-pedicle accuracy.
The pairing of real-time navigation to robotic guidance offers further benefit. Computer-assisted navigation technology allows surgeons greater visualization of bony anatomy through limited MIS incisions and has the potential to reduce radiation exposure and enhance surgical accuracy without increasing operative time [10-15].
The benefits of the MIS approach to spine surgery with the use of navigation and robotic guidance are widely published in the literature; however, the need to improve upon the ability to achieve a strong posterior fusion with these MIS techniques has yet to be highlighted. Historically, facet decortication and laying down bone graft with an MIS approach was difficult and inconsistent, leaving the only way to adequately achieve a posterior fusion was with the open surgical approach. With the ongoing advancements in robotic-guided systems, preoperative planning for facet trajectories will allow for the precise intraoperative execution of facet decortication and the placement of bone graft, all achieved through the same small incision made for pedicle screw insertion.
CONCLUSION
One of the key challenges with a minimally invasive approach to spinal fusion surgery is achieving solid posterior fusion. This paper describes the feasibility and workflow for both the preoperative planning and the intraoperative execution of facet decortication and fusion in an MIS fashion. The advancement of this technique will expand the indications for using an MIS approach to spine surgery where achieving posterior fusion is a necessity.