



INTRODUCTION
Three-dimensional (3D) printing technology allows rapid production of 3D objects from a variety of materials. Current applications of 3D printing in neurosurgery consist of creation of patient-specific anatomical models for training and simulation [1-14] and, more recently, production of patient-specific implants for spine and cranial surgery [15-21]. An as yet unexplored facet of the 3D printing technology is that it provides an opportunity for surgeons to readily produce and share surgical instruments of their own design. Many software programsŌĆösome simple to use and free of chargeŌĆöare available for creating the 3D design files used for 3D printing. While desktop 3D printers generally use plastic polymers such as polylactic acid (PLA), which cannot be heat-sterilized, industrial printers can print objects using a variety of metals (e.g., stainless steel or titanium) that can be sterilized and used in surgery. Surgeon-inventors may upload their 3D design files online to a number of commercial sites that would print the objects from the desired metal in short order. Furthermore, surgeons may readily share their design files via the internet with their colleagues throughout the world, who would then print and use the novel tools in their own practices.
As proof of concept, in this article we provide a link to a downloadable 3D design file and discuss the assembly, testing and operation of a spine localizer that can be printed and used for spine surgery. We have previously described a laser-guided spine localizer that is used in combination with portable radiographs to noninvasively locate the optimal incision site over a target spine segment [22]. The 3D-printable version of that spine localizer presented in this article is a simplified device that does not rely on lasers but on the built-in guide light in the X-ray tube to resolve parallax caused by misalignment of the X-ray beam and the localizer arms. Since the device is used prior to sterile preparation of the surgical site and does not require sterilization, it can be printed out of low-cost PLA by a common desktop 3D printer and used immediately in surgery. It is important to emphasize at the outset that the aim of this article to demonstrate the feasibility of online dissemination of neurosurgical tools rather than the usefulness of this particular device.
MATERIALS AND METHODS
1. Device Description and Method of Use
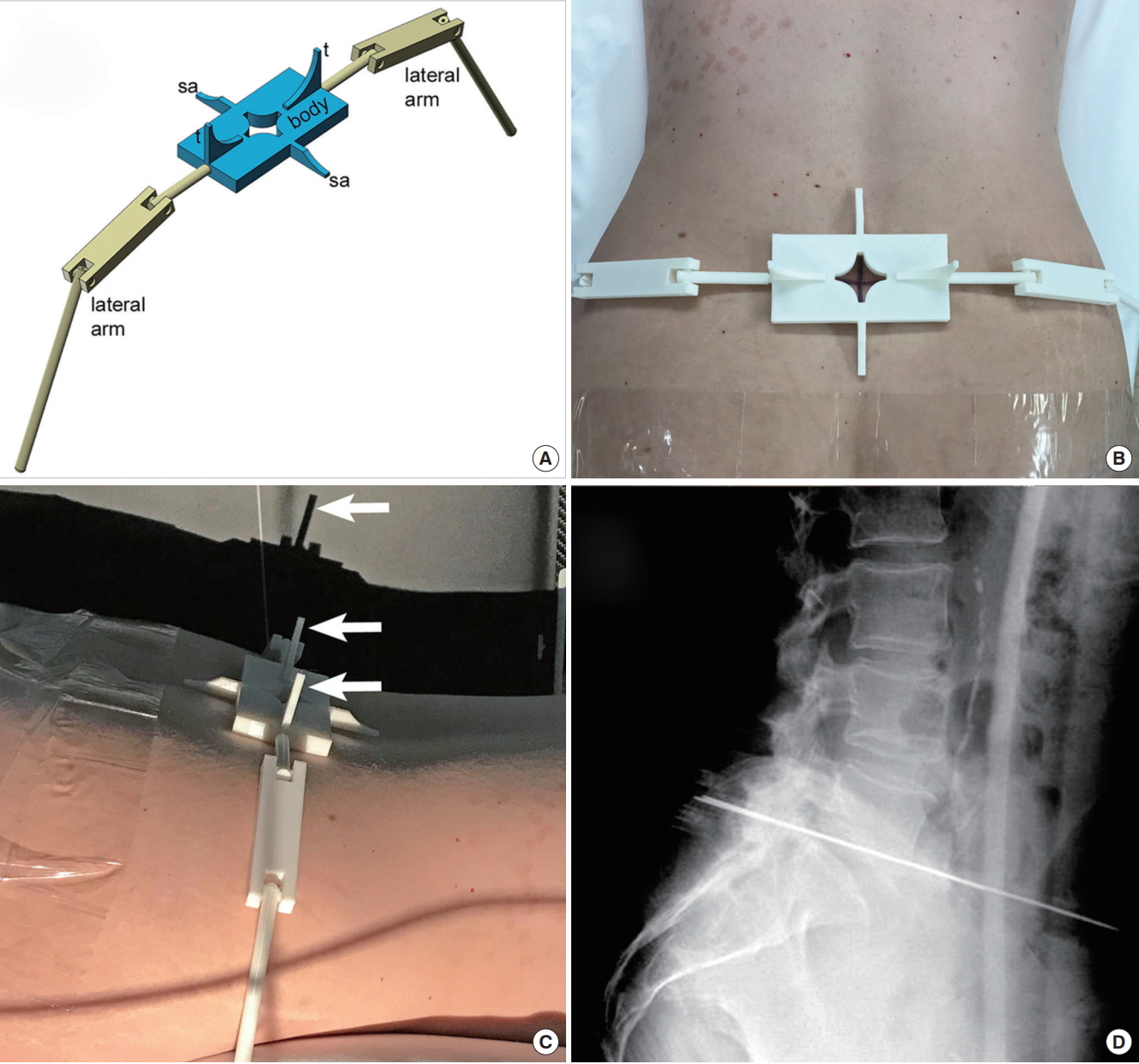
The spine localizer consists of a body that is centered over the putative incision site on the back of the patient and 2 lateral articulating arms that are placed on either side of the patient (Fig. 1A, B). Sagittal alignment limbs (sa) are used to align the localizer with the midline of the spine. The portable X-ray tube and cassette are positioned in the customary cross-table lateral configuration. The built-in guide light in the X-ray tube is turned on to project shadows from bilateral towers (t) on the body of the localizer onto the cassette (Fig. 1C). The location and tilt of the X-ray tube are then adjusted until the 2 tower shadows overlap. A radiograph is obtained, revealing the image of 2 overlapping K-wires (that are embedded in the lateral arms of the localizer) projected over the target spine segment (Fig. 1D). If the K-wires do not point to the desired spine segment, the localizer is moved accordingly and the procedure is repeated. If the X-ray beam is not perfectly orthogonal to the 2 lateral arms, parallax occurs and the 2 K-wires appear splayed apart on the image. In this case, the target spine segment is always between the 2 K-wires. The mathematics governing this misalignment error has been previously described [22].
2. Printing and Assembly
The 3D design file for the spine localizer is provided as a standard tessellation language (STL) file, a common file format for 3D printing, and can be downloaded at https://drive.google.com/open?id=0B6w2O0kPwoCWN2hUcW5YMjBjNXc. After download, the file is fed to a 3D printer that uses PLA as printing substrate. The particular printer's prompts and procedure are followed as usual. Print quality can be set at an intermediate level. The options for adding supports and rafts to the model are not selected in the print dialogue. The file will print (as separate objects) the localizer body (b), 2 lateral articulating arms (la), and a wall-mount (wm) used for storage of the device (Fig. 2A). Each articulating arm has 2 joints (j) that are initially lightly fused and must be carefully broken and mobilized (Fig. 2B). To make the lateral arms radio-opaque, K-wires (0.054 inch [1.4 mm]) are inserted through the small holes in the distal tip of each lateral arm (Fig. 2B) and trimmed flush with the plastic tip by using a wire cutter. If necessary, a droplet of glue is placed at the tip of lateral arm to keep the K-wire in place. The articulating lateral arms are then inserted into the localizer body through the lateral slots on each side of the body (Fig. 2B).
3. Study Design
Institutional Review Board approval was obtained at the Bayshore Medical Center (approval number: 7133592183) for this study and patients were individually consented prior to surgery. The 3D-printed spine localizer was prospectively evaluated in 43 consecutive patients undergoing 1-level lumbar microsurgical decompression procedures (laminotomy with or without discectomy or foraminotomy) by a single surgeon. No patients were excluded. In each case, before sterile preparation of the field, the surgeon initially estimated the location of the target segment by palpating the spine and the iliac crest and drawing a cross mark over the putative incision site. The spine localizer was deployed as described above and a portable lateral radiograph was obtained. If the surgeon's initial estimate was incorrect and a segment other than the desired segment was located, the spine localizer was moved accordingly and additional radiographs were taken until correct localization was obtained. The field was then prepped and a small skin incision (2ŌĆō5 cm, depending on the patientŌĆÖs size) was made over the cross mark to create a vertical corridor to the underlying spine segment. In all cases, an additional postincision portable radiograph was obtained with a radio-opaque surgical tool (nerve hook or curette) to definitely locate the target spine segment before proceeding with bone removal.
Data regarding patient age, sex, target spine segment location, presence of transitional lumbosacral anatomy, and body mass index (BMI) were collected. Two separate measures of localization accuracy were considered. Accuracy of surgeon's initial estimate of target site was defined as the proportion of cases in which the localizer pointed to the correct target segment on the initial preincision radiograph. Device accuracy was defined as the proportion of cases in which the final preincision radiograph (obtained with the localizer) and the postincision radiograph (obtained with a radio-opaque surgical tool) corresponded to the same target segment.
4. Statistical Analysis
The chi-square test was used to evaluate the association between categorical variables. The 2-tailed Student t-test was used to compare means of 2 categories of continuous data. Adherence to normal distribution was assessed using frequency histograms. A probability value <0.05 was considered significant. All mean values are presented with standard deviation (SD) values.
RESULTS
The study population consisted of 23 male (53%) and 20 female patients (47%). Patient age ranged from 22 to 85 years (mean┬▒ SD, 60.3┬▒16.2 years). BMI ranged from 18.2 to 50.4 kg/m2 (30.9┬▒ 7.3 kg/m2). Target spine segments included L2ŌĆō3 (3 patients), L3ŌĆō4 (7 patients), L4ŌĆō5 (19 patients), and L5ŌĆōS1 (14 patients). Five patients (11.6%) had transitional lumbosacral anatomy consisting of partial or complete sacralization of the L5 or lumbarization of S1.
The printed localizer was usable in all patients in this study regardless of their body shape or BMI. The K-wires embedded in the lateral arms of the localizer were visible on lateral radiographs in all cases. In 35 cases (81%), the surgeonŌĆÖs initial estimate of the target site was correct. In the remaining 8 cases (19%), the initial estimate was off by 1 motion segment. In these 8 cases, in keeping with the study protocol, the localizer was moved and second radiograph was obtained to correctly locate the target segment before making the incision. A third preincision radiograph was not required in any of the cases. Inaccuracy of the surgeonŌĆÖs estimate of the target site (based on palpation of anatomical landmarks) was found to be associated with greater BMI and presence of transitional lumbosacral anatomy, but not with age, sex, or location of the target segment (Table 1).
In all patients one and only one postincision radiograph was taken after exposure of the boney anatomy. In all patients, the location of the incision guided by the localizer was found to overlie the target segment as confirmed by the postincision radiograph, yielding a device accuracy of 100%. There was no need to extend the incision or modify the surgical trajectory in any of the cases.
DISCUSSION
Inadequate intraoperative imaging is a major contributor to wrong-level spine surgery [23]. Several accepted techniques exist for localization of skin incision in spine surgery. Surgeons have their own preferences regarding the use of intraoperative fluoroscopy versus single-shot portable radiographs taken with a radio-opaque marker. The goal of this article is not to supplant any of these well-established techniques but to use the example of the localizer device as a demonstration of feasibility of online dissemination of surgical tools.
We have previously reported the design and use of a laserguided localizer for preincision localization of spine segments [22]. However, this device is not commercially available and is cumbersome to make at the point of use at individual surgical facilities. The widespread availability of 3D printing technology allows one to overcome the limitations surrounding production and distribution of this and other surgical tools and devices.
In this article, we introduce the possibility of online dissemination of a 3D design file for a neurosurgical device that can be downloaded, printed, and assembled at the point of use. This study also demonstrates that the printed device can be used safely and effectively in surgery. In this particular case, the fact that the device is designed for use before sterile preparation of the surgical field allows it to be printed from PLA, the low-cost plastic polymer commonly used by desktop 3D printers. Although PLA and other plastics used for 3D printing deform in the high temperatures used for sterilization, it is simple to order metallic 3D prints for surgical tools that require sterilization. In practice, the surgeon would first print a PLA prototype of his design, refine the design as necessary, and then upload the final STL file to any of a number of commercial web sites that would print the device out of the desired metal. The possibilities for surgical tools that can be designed and disseminated by this method are limited only by the surgeon-inventorŌĆÖs imagination. Examples would include special-purpose dissectors, retractors, curettes, rongeurs, drills, drivers, guides, etc. For this study, we chose the example of the localizer for two reasons. First, it is a device that is used prior to sterilization of the field; therefore, it could be made out of low cost PLA, thus simplifying the study design. Second, it is a multicomponent device, thus demonstrating the feasibility of assembling the 3D-printed components.
Customization of surgical devices based on individual surgeonsŌĆÖ needs and preferences is not a new concept. Several surgical device manufacturers have been open to customizing the size and shapes of tools within their product line based on the preferences of surgeons. However, this customization service is not universally available, is expensive, frequently has a long turn-around time, and does not apply to major modifications of existing tools or to new instruments outside the product line of a particular manufacturer. The ability to conceive, design, print, and use a new surgical tool provides a level of creative freedom seldom enjoyed by surgeons before the advent of 3D printing.
To date, applications of 3D printing in neurosurgery have been limited to production of anatomical models for training of surgeons and/or simulation of surgery and production of customized implants specifically designed to fit a particular patientŌĆÖs anatomy [1-21,24,25]. Also, the fact that 3D-printed implants from titanium powder offer greater porosity than cast titanium has been used to advantage in producing osteo-conductive implants that could provide better bone-metal integration [26]. More recently, patient-specific drill guides have been 3D printed to aid with placement of spine screws in challenging cases [27-29]. The current study expands upon these applications to introduce online dissemination of surgical tools.
As a matter of precedent, it is noteworthy that remote distribution of 3D-printed tools has already been implemented at the International Space Station, where storage constraints are circumvented by on-demand printing of tools from design files transmitted from Earth. More relevant to the surgical disciplines, 3D printing of surgical instruments for long-duration space missions has been studied [30,31]. Such advances support the notion that the widespread availability of 3D printing technology may herald the age of online tool-sharing. As this field evolves, certain practical concerns will have to be addressed regarding intellectual property (IP) rights and other legal and regulatory issues. Surgeons may choose to disseminate their novel designs into the public domain without IP constraints (as we have done in this article) with the provision that the device would not be mass-produced or marketed by any recipient for commercial benefit. Just as the open-source model has stimulated innovation in the computer software field, it is hoped that sharing of designs by surgeons would lead to a proliferation of new and useful surgical tools and devices. As with conventional surgical instruments, surgeon end-users bear sole responsibility for appropriate and prudent use of the device they have printed. In the case of the 3D-printed localizer offered in this article, it is imperative that a postincision radiograph be taken with a radio-opaque object at the target site, as emphasized in the study protocol, to definitively confirm correct localization before proceeding further with surgery.
CONCLUSION
By providing the design file for a spine localizer that can be 3D-printed and assembled at the point of use and deployed in surgery, this study serves to introduce the concept of online dissemination of novel surgical instruments and aims to promote online tool sharing by neurosurgeons across the world.